| 
INDOOR LOCALIZATION FOR THE VISUALLY IMPAIRED
UMN Researchers: Joel Hesch , Prof. Stergios Roumeliotis
Motivation:Mobility is an essential capability for any person who wishes to
have an independent life-style. It requires successful execution
of several tasks including path planning, navigation, and obstacle
avoidance, all of which necessitate accurate assessment of the
surrounding environment. For a visually impaired person
these tasks may be exceedingly difficult to accomplish, and there
are high risks associated with failure in any of these. Seeing-eye
dogs and white canes are widely used for the purpose of guidance
and environment sensing. The former, however, has costly and often
prohibitive training requirements, while the latter can only
provide cues about ones immediate surroundings. Human performance
on information-dependant tasks, can be improved by sensing which
provides information (e.g., position, orientation, or local
geometry) and environmental cues via the use of appropriate
sensors and sensor fusion algorithms. We are working on a novel
indoor localization method for the visually impaired which has the
potential for prodigious humanitarian impact. With the use of this
localization aid, guidance and navigation algorithms can be
implemented which will greatly increase the safety and overall
mobility of its user.

Contribution:
In our first paper, we present a handheld electronic aid capable of pinpointing its location within a building while the user holding it walks around. The purpose of this aid is to eliminate challenges that the visually impaired face on a daily basis. The most notable of these are navigating in unknown environments and safety concerns due to unseen and moving obstacles. Our vision is to mold this prototype with limited capabilities into a complete solution which is unobtrusive, reliable, and highly versatile; capable of performing intelligent tasks such as mapping, route planning, and interacting with its user by providing cues about the environment as well as guidance information.

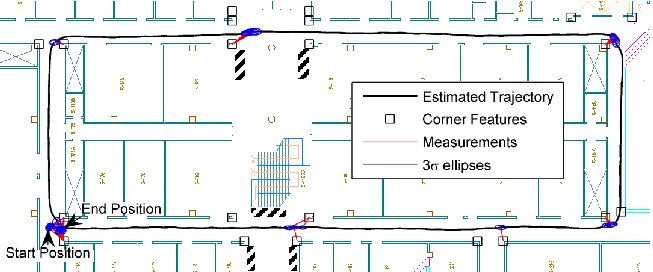
Experimental results:
Below are the results of a test in an indoor
environment on a closed loop of path length 130m. Twenty-one
corners along this loop were known a priori from the
building blueprints, and were used as features for position
updates. While
walking around, the user testing the cane swung it to-and-fro in a
natural manner searching for obstacles which might lie in their
path. The figure below shows the estimated trajectory
super-imposed on the floor diagram. The striped regions in the
figure depict obstacles such as couches and garbage cans, which
are not detailed in the building blueprint. Additionally,
some of the doors along the hallways were open, while others were
closed. During testing there was a normal flow of pedestrian
traffic through the hallways. All of the corners in the map are
shown as boxes, and every measurement which was used to update the
position estimate is marked with a line to the corresponding
corner.
Relevant Publications:
-
J.A. Hesch and S.I. Roumeliotis "An Indoor Localization Aid for the Visually Impaired", In Proc. 2007 IEEE International Conference on Robotics and Automation (ICRA'07), Apr. 2007 - pdf).
Acknowledgements: This work was supported by the University
of Minnesota (GiA program) and the National Science Foundation (EIA-0324864, IIS-0643680).
|