- Google Researchers
- Esha Nerurkar and Joel Hesch
- Summary
We address the problem of cooperative mapping (CM) using datasets collected by multiple users at
different times, when the transformation between the users' starting poses is unknown. Specifically,
we formulate CM as a constrained optimization problem, where each user's independently-estimated
trajectory and map are merged together by imposing geometric constraints between commonly-observed
point and line features.
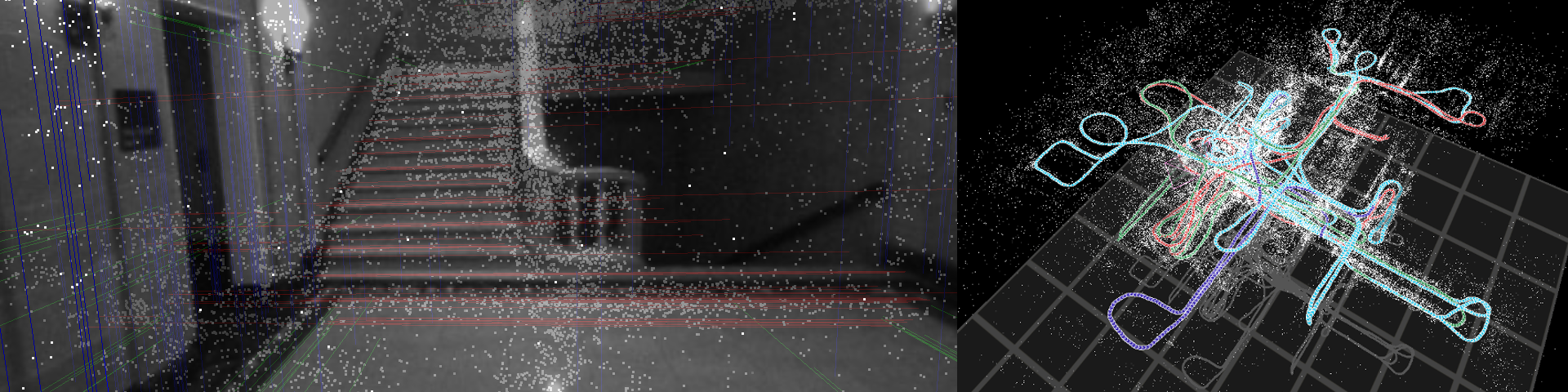
The line features are tracked by considering the geometric constraints between the line segments in
consecutive image pairs. Additionally, line loop-closures (intra or inter-dataset) are detected by
employing geometric tests on the optimized trajectories and maps. Furthermore, we provide an
algorithm for efficiently solving the CM problem by taking advantage of its special structure. The
proposed solution is proven to be batch least-squares (BLS) optimal over all users' datasets, while
it has low memory requirements and lends itself, for the most part, to parallel implementations.
Moreover, our algorithm is resource-aware as it is able to trade positioning accuracy for
computational cost in a consistent manner, by reducing the number of commonly-observed feature
constraints.
- Algorithm Overview
Main steps:
- Compute a BLS estimate for each user's trajectory and map independently using their own
visual-inertial data
- Track lines by using the trajectory estimates and line segments in the images.
- Generate an initial estimate of the users' relative poses based on their observations of
common features
- Find the optimal BLS solution of all users' trajetories and maps utilizing all available
sensor data, and all (or a subset of) the common-feature constraints
- Find line loop-closure features based on visibility and geometric tests.
- An interactive visualization of various conference-site and building maps can be found at http://onionmaps.info.
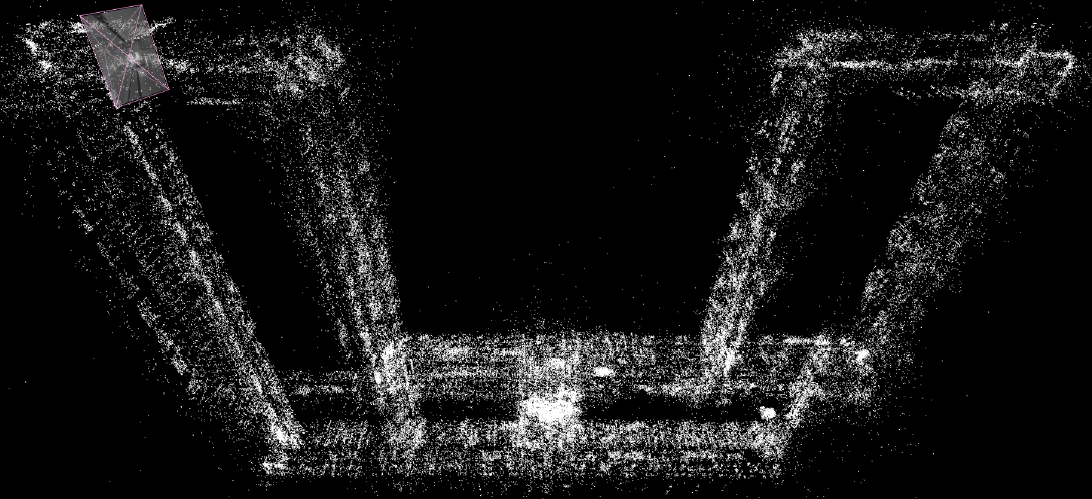
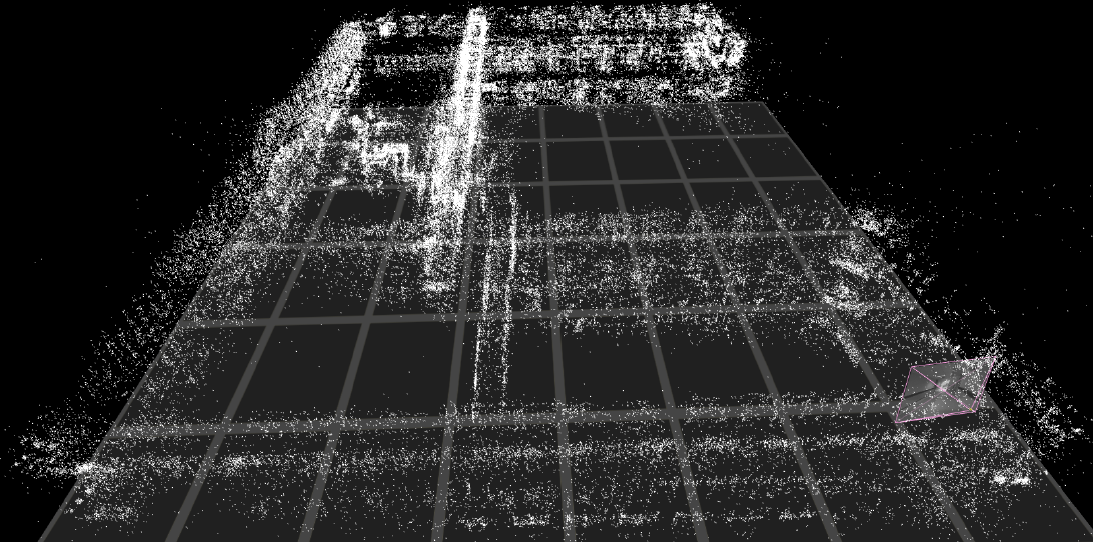
- The estimated map of Keller Hall at University of Minnesota
- The estimated map of Walter library at University of Minnesota
- Relevant Publications
- P1. C.X. Guo, R.C. DuToit, K. Sartipi, G.Georgiou, R. Li, J. O'Leary, E.D.
Nerurkar, J.A. Hesch, and S.I. Roumeliotis, "Resource-Aware Large-Scale Cooperative
3D Mapping from Multiple Cell Phones," In ICRA Late Breaking Results Poster,
Washington, May. 26-30, 2015.
- C1. C.X. Guo, K. Sartipi, R.C. DuToit, G.Georgiou, R. Li, J. O'Leary, E.D.
Nerurkar, J.A. Hesch, and S.I. Roumeliotis, "Large-Scale Cooperative 3D
Visual-Inertial Mapping in a Manhattan World," ICRA, 2016 (submitted).