Fault Detection and Identification for Mobile Robots
- Summary
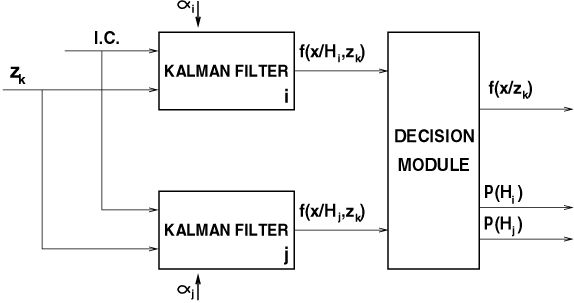
Autonomous vehicles comprise numerous electromechanical and sensory components that are susceptible to failures. Real-time detection of potential fault modes is a necessary condition for the reliable execution of any task. We have designed and implemented arrays of model-based diagnostic estimators that monitor the health status of a wheeled robot, detect and identify temporary or permanent failures, and provide appropriate information for selecting amongst various reconfigurable control strategies.
- Relevant Publications
- C3. P. Goel, G. Dedeoglu, S.I. Roumeliotis, and G.S. Sukhatme, "Fault Detection and Identification in a Mobile Robot Using Multiple Model Estimation and Neural Network" . In Proc. 2000 IEEE International Conference on Robotics and Automation, San Francisco, California, April 22-28, pp. 2302-2309. ( abstract , postscript , pdf )
- C2. S.I. Roumeliotis, G.S. Sukhatme, and G.A. Bekey, "Sensor Fault Detection and Identification in a Mobile Robot". In Proc. 1998 IEEE/RSJ International Conference on Intelligent Robots and Systems, Victoria, Canada, Oct. 13-17, 1998, pp.1383-1388. ( abstract , postscript , pdf )
- C1. S.I. Roumeliotis, G.S. Sukhatme, and G.A. Bekey, "Fault Detection and Identification in a Mobile Robot using Multiple-Model Estimation". In Proc. 1998 IEEE International Conference on Robotics and Automation, Leuven, Belgium, May 16-21, 1998, pp. 2223-2228. ( abstract , postscript , pdf )