Performance Characterization of Cooperative Localization and Tracking
- The derivation of a "bounding" Linear Time Invariant (LTI) system whose covariance at every time step is provably greater or equal to that of the original non-linear system. This is achieved by determining upper bounds on the system noise covariance matrix and the relative position measurement covariance matrix.
- The solution of the Riccati equation for the LTI system.
When a team of robots is employed for tracking a number of targets, the position of the robots (Localization) and the position of the targets (Tracking) need to be concurrently estimated. In this project we study the problem of Cooperative Localization and Target Tracking in scenarios where teams of, possibly heterogeneous, mobile robots track the position of multiple targets. Specifically, we develop the analytical tools required for performance characterization of these systems.
Performance characterization is the most important step that must be taken before any investment in system development is made. We must be able to predict the robots' performance on average and in the worst case before actually implementing the system. Here, performance refers to the accuracy of position estimation and is assessed by the state estimates' covariance for the robots and the targets. In particular we are interested in an analysis of the positioning performance in terms of the number of robots and targets, sensors' characteristics, and the structure of Relative Position Measurement Graph (RPMG) that describes the measurement topology between the robots and the targets.
In this project, by employing an Extended Kalman Filter framework, we develop a set of worst-case bounds for the positioning accuracy of the robots and the targets. Furthermore, we investigate how a priori information about the stochastic distribution of the robots' and targets' position can be utilized to derive bounds for expected value of the position estimate covariance. This performance analysis is based on:
These performance bounds can be employed in order to predict the positioning accuracy in a certain tracking application, and thus can facilitate the task of sensor selection so as to meet user-imposed requirements.
-
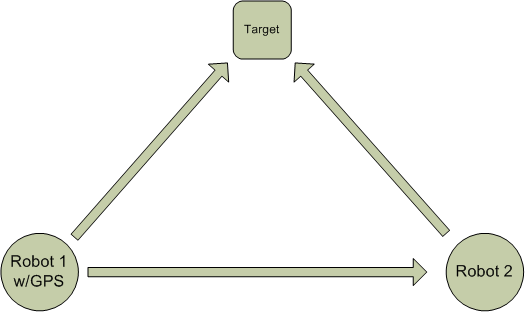
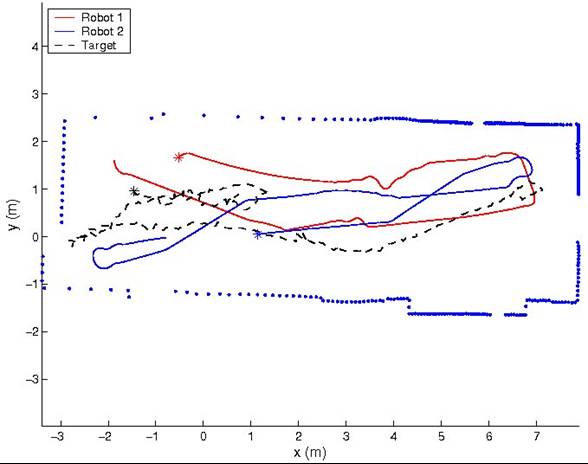
We have carried out experiments to verify our theoretical analysis. The RPMG for the experiment shown here is shown in the following figure:
-
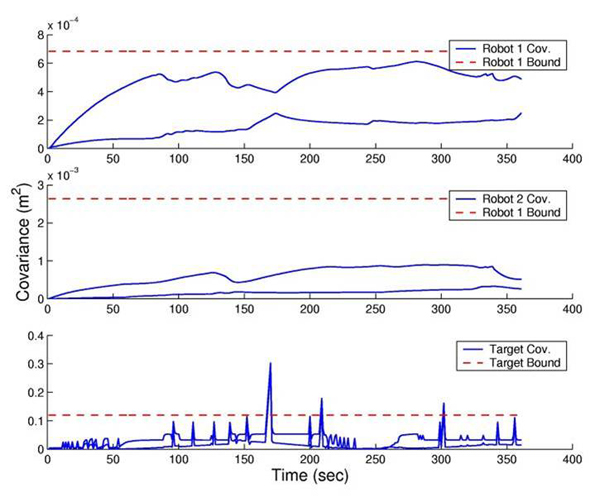
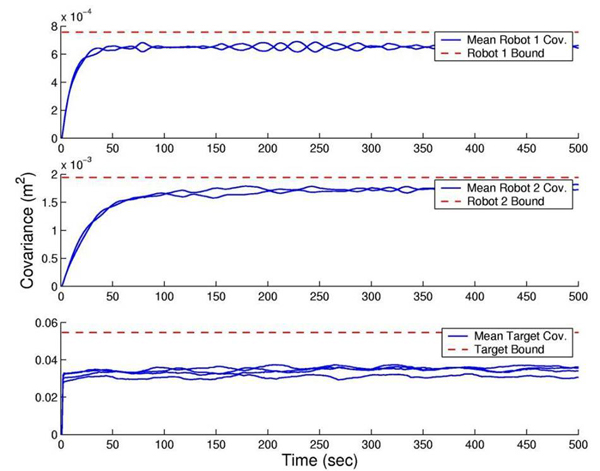
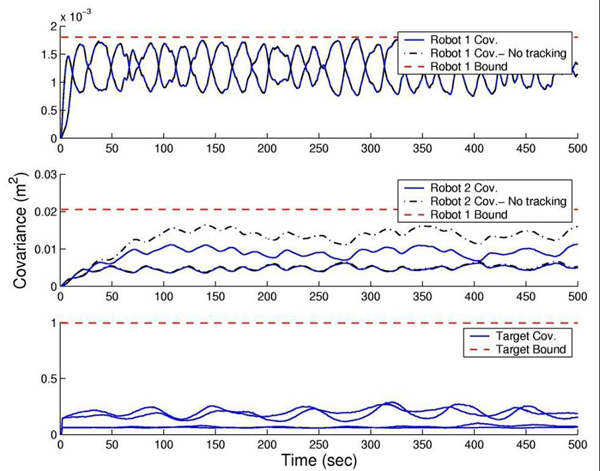
To test the bounds on the expected uncertainty, extensive simulation tests have been carried out. The results are shown in the following figures:
Figure 1: Actual covariance (averaged - solid blue lines) and expected covariance (predicted - dashed red lines) for the robots and the target.
-
We are currently extending the results of this work to the cases where both robots and targets navigate in 3D. Additionally, we are planning to address the problem when distance-only or bearing-only measurements are used for tracking the targets.
- C1. F.M. Mirzaei, A.I. Mourikis, and S.I. Roumeliotis, "On the Performance of Multi-robot Target Tracking", In Proc. 2007 IEEE International Conference on Robotics and Automation (ICRA'07), Rome, Italy, Apr. 10-14, pp. 3482-3489 (pdf).