Optimal Sensing Strategies for Mobile Robot Formations
This work addresses the problem of Cooperative Localization (CL) in robot formations. In particular, our goal is to determine optimal sensing strategies for the robot team, that maximize the estimation accuracy under constraints imposed by the limited computational and communication resources.
We examine the case where data fusion is carried out by a centralized extended Kalman filter (EKF) estimator, which optimally combines the odometry and exteroceptive (e.g., GPS, compass, relative-position) measurements of all robots. In this scenario, each robot's odometry measurements can be processed locally by the robot, to propagate its own pose estimates. However, every time an exteroceptive measurement is received by any of the robots in the formation, all robots must communicate their current pose estimates. Additionally, the measuring robot must transmit its new measurement in order for an EKF update to be carried out.
Therefore, every exteroceptive measurement that is processed incurs a penalty in terms of use of communication bandwidth, CPU time, and power consumption. In a realistic scenario, the robots of a team will need to allocate computational and communication resources to mission-specific tasks, and this may force them to reduce the number of measurements they process for localization purposes. Moreover, the finite battery life of robots imposes constraints on the amount of power that can be used for tracking their position. The limitations on the available resources may thus prohibit the robots from registering, transmitting, and processing all measurements available at every time instant. Clearly, a framework for optimizing the estimation accuracy under the given constraints is required.
Whether or not an exteroceptive measurement should be processed in an EKF update, is determined by a tradeoff between the value of the localization information it carries, and the cost of processing it. In this paper, we assume that the robots process each of the available measurements at a constant frequency. Our goal is to determine the optimal frequency for each available measurement, so as to attain the highest possible positioning accuracy.
Our analysis is based on examining the "rate of information" that each particular measurement contributes to the estimator. Based on this analysis, we can derive an equivalent, continuous-time system model for the robot team, whose noise parameters are functionally related to the frequency of the measurements. This is demonstrated in the following figure:
-
The novel formulation proposed in our work enables us to express the covariance matrix of the pose errors as a functional relation of the frequencies, and thus to formulate the problem of determining the optimal sensing strategy as an optimization one. An important result that we prove is that this is a convex optimization problem (SDP) and therefore it is possible to compute a globally optimal solution, using very efficient algorithms.
Our approach makes it possible to determine the optimal sensing strategy that satisfies any application-imposed constraints on communication, power, and processing resources. In addition, the results of this work may also be employed to reduce the cost of a robot team design. Specifically, if measurements from certain active sensors (e.g., lasers) are processed at a low rate, it may be possible to replace these particular sensors with slower (and cheaper) ones. Finally, in the event that the utilization frequency of a specific sensor is determined, through the optimization process, to be approximately zero, this sensor may be omitted altogether, thus reducing the cost of the robots' sensing payload.
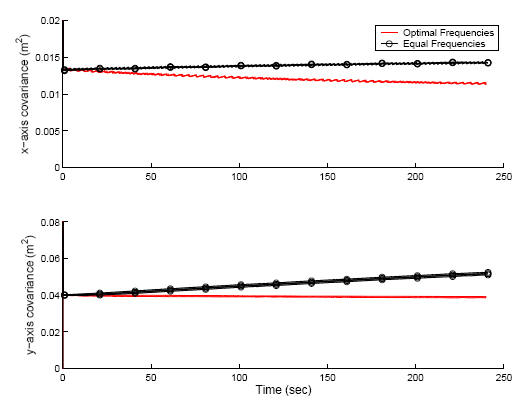
Our method has been applied to determine the optimal sensing frequencies for the robot team, and the accuracy of the derived sensing strategy was compared against the accuracy of an "intuitively good" strategy, where all available sensors are used at equal rates. The comparison of performance is shown below:
- C2. A.I. Mourikis, S.I. Roumeliotis: "Optimal Sensor Scheduling for Resource-Constrained Localization of Mobile Robot Formations,'' IEEE Transactions on Robotics 22(5), pp. 917-931, Oct. 2006.
- C1. A.I. Mourikis, S.I. Roumeliotis: "Optimal Sensing Strategies for Mobile Robot Formations: Resource-Constrained Localization," Proceedings of Robotics: Science and Systems, June 8-11, 2005, Boston, MA, pp. 281-288.
-
This work was supported by the University of Minnesota (DTC), the Jet Propulsion Laboratory (Grant No. 1251073, 1260245, 1263201), and the National Science Foundation (ITR-0324864, MRI-0420836).