A Comparative Analysis of Tightly-coupled Monocular, Binocular, and Stereo
VINS
- Abstract
In this paper, a sliding-window two-camera vision-aided inertial navigation system (VINS) is
presented in the square-root inverse domain. The performance of the system is assessed for the cases
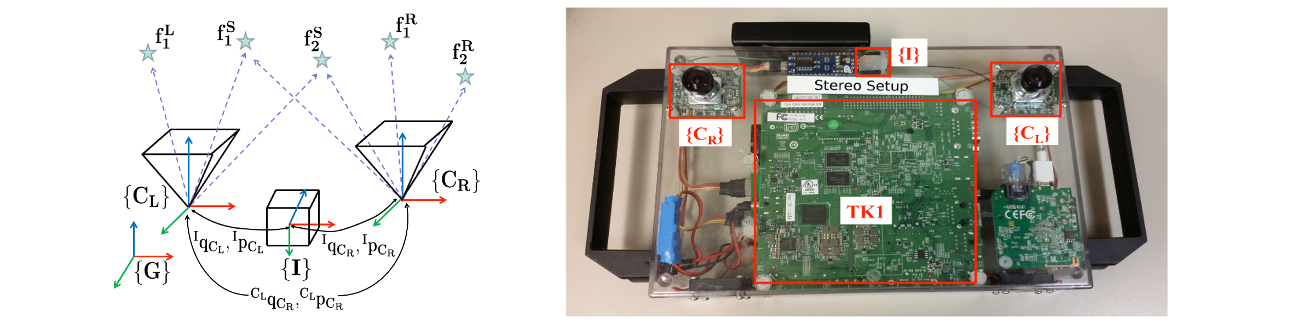
where feature matches across the two-camera images are processed with or without any stereo
constraints (i.e., stereo vs. binocular). To support the comparison results, a theoretical analysis
on the information gain when transitioning from binocular to stereo is also presented. Additionally,
the advantage of using a two-camera (both stereo and binocular) system over a monocular VINS is
assessed. Furthermore, the impact on the achieved accuracy of different image processing frontends
and estimator design choices is quantified. Finally, a thorough evaluation of the algorithm's
processing requirements, which runs in real-time on a mobile processor, as well as its achieved
accuracy is provided, for various scenes and motion profiles.
- Code Binary
The binaries for the stereo VINS algorithm presented in this paper are available here (link).
- Dataset
The datasets presented in the paper are available here (link).
- Relevant Publications
- C1. M. K. Paul, K. Wu, J. A. Hesch, E. D. Nerurkar, and S. I. Roumeliotis,
"A Comparative Analysis of Tightly-coupled Monocular, Binocular, and Stereo VINS,"
International Conference on Robotics and Automation (ICRA),
Singapore, May 29 - June 3, 2017. (link)