
High-Precision, Incremental 3D Indoor Localization and Mapping using Mobile Devices
- Georgios A. Georgiou and Stergios Roumeliotis (PI)
-
In this work, we present an incremental batch least-squares (IBLS) localization and mapping
algorithm for resource-constrained mobile devices (e.g., cell phones and tablets), using visual and
inertial data from their commercial-grade, low-cost sensors. Real-time, high-accuracy performance is
achieved by executing two modules in parallel:
- 1. A highly-efficient, sliding-window, vision-aided inertial navigation system (VINS) [e.g., the multi-state constrained Kalman filter (MSCKF), or the square root inverse sliding window filter (SR-ISWF)] that provides high-rate pose estimates using only recent visual and inertial measurements, and
- 2. A BLS optimization algorithm for intermittently refining the pose and map estimates using all, up to that time, visual and inertial measurements.
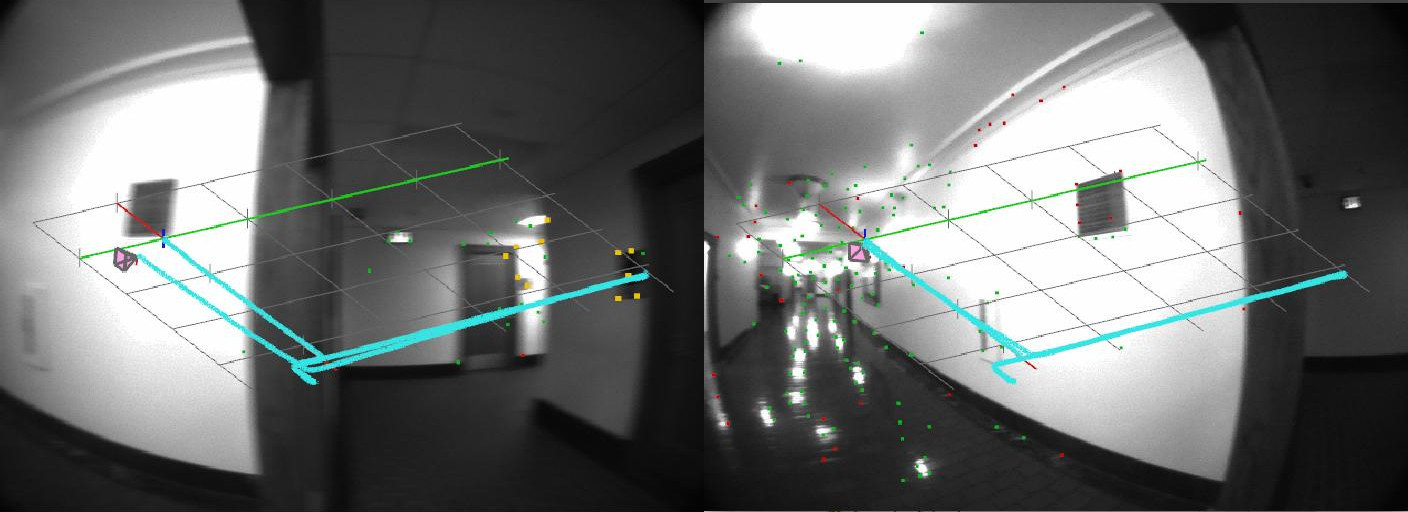
Trajectory estimate before (left) and after (right) BLS refinement
-
The user’s trajectory is viewed as a sequence of path segments {Pk | k ∈
Ν}. As the front-end VINS estimates in real time the poses within the segment
Pk, the back-end BLS refines the pose estimates within all past increments,
P1, .., Pk-1, while creating a map of the area.
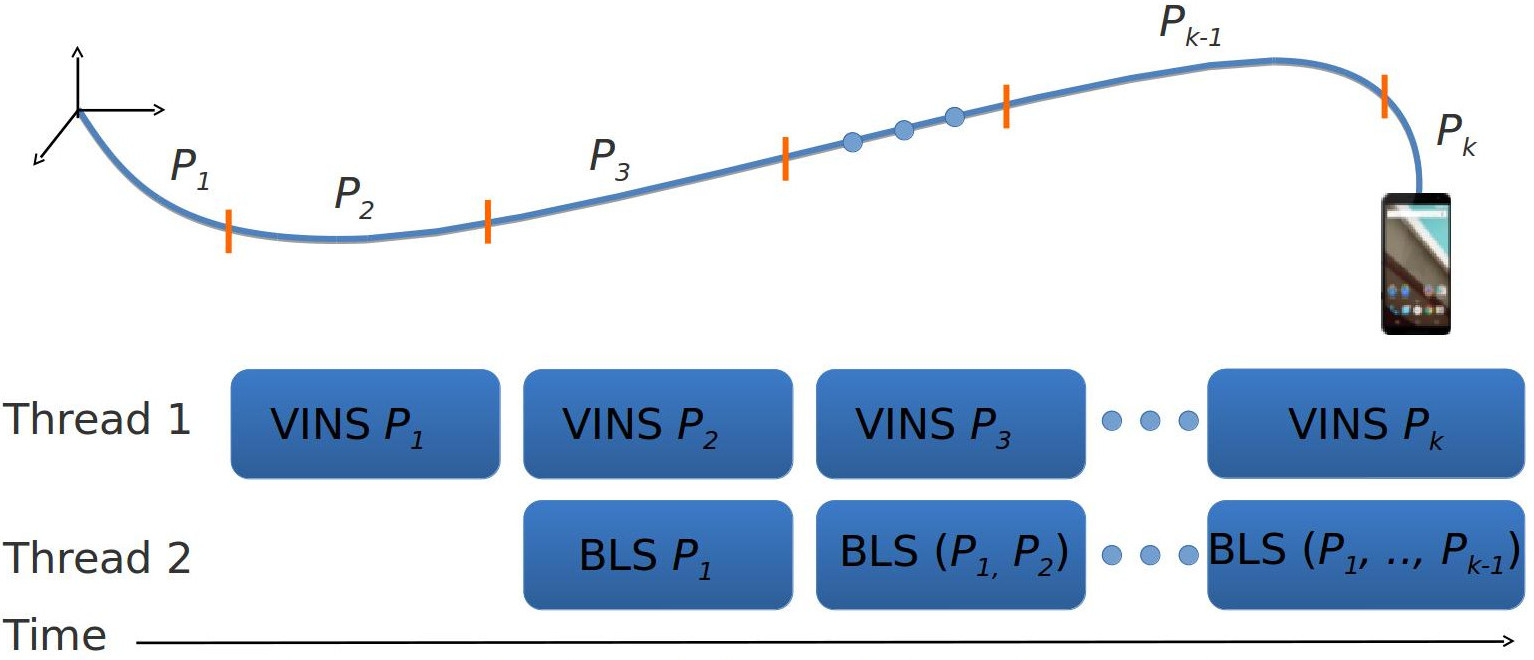
Processor's view of the trajectory path segments
-
Experimental validation, using the Project Tango tablet, has shown that the IBLS provides
sub-decimeter level positioning accuracy over a path of 38 meters.

RMSE wrt ground truth provided by a VICON® system
- C2. K.J. Wu, A.M. Ahmed, G.A. Georgiou, and S.I. Roumeliotis, "A Square Root Inverse Filter for Efficient Vision-aided Inertial Navigation on Mobile Devices," Robotics: Science and Systems (RSS'15), Rome, Italy, July 13-17, 2015 (pdf).
- C1. C.X. Guo, D.G. Kottas, R.C. DuToit, A. Ahmed, R. Li, and S.I. Roumeliotis, "Efficient Visual-Inertial Navigation using a Rolling-Shutter Camera with Inaccurate Timestamps," Robotics: Science and Systems (RSS'14), Berkeley, CA, July 12-16, 2014 (pdf).