The goal of this work is to create the Google Maps experience indoors; that is, to enable a person
or a robot to find their position on a blueprint in real-time using visual and inertial data from a
mobile device.
Algorithm steps:
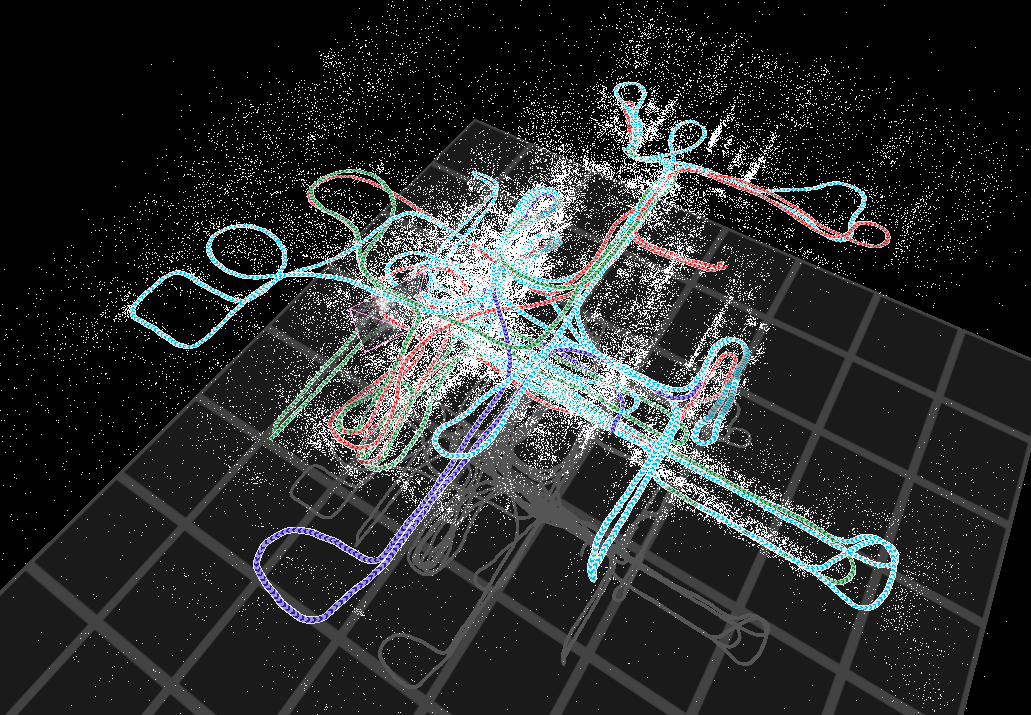
1. Map building - A map of the area of interest, consisting of 3D landmarks with
associated feature descriptors (i.e., ORB or FREAK), is constructed using the cooperative
mapping (CM) algorithm.
2. Blueprint-map alignment - For visualization purposes, the point cloud of landmarks
is aligned to the area's blueprint.
3. Real-time, map-based localization - Initially, the mobile device uses the
multi-state constrained Kalman filter (MSCKF)
to track its 3D pose with respect to its starting point. In parallel, each acquired image is
compared against those used for constructing the area's map, so as to determine matches
between features detected in the user's surroundings and those appearing in the map. These
correspondences are processed by the MSCKF to improve the positioning accuracy and localize
against the map/blueprint.
Images
An image of a map produced by CM (see onionmaps.info
for an interactive visualization)
Features found in current image (left) corresponding to mapped
features (right)
Screenshot of real-time localization (lower left insert is
current image, arrow denotes position and heading)