- Summary
The goal of this project is to generate a semi-dense 3D map of an area, given as prior the camera pose estimates from a sparse visual-inertial batch least squares (BLS) cooperative-mapping (CM) algorithm. Specifically:
- 1. To densify the map, we consider all pixels that have a large gradient along the epipolar line
- 2. To track features, we perform sub-pixel stereo matching between consecutive keyframes; matches are found using the sum of squared distance (SSD) error measured over a linear patch of five equidistant points on the epipolar line
- 3. Outlier rejection is based on the convexity of the photometric cost function, uncertainty of the inverse depth estimate, and depth inconsistency in the neighbourhood of the feature
- 4. Inlier feature tracks are processed using BLS to refine the feature estimates. In this step, instead of a constant measurement noise for the dense features, we use the inverse of the information matrix, whose diagonal elements are proportional to the features' local intensity gradients (gx, gy)
- Results

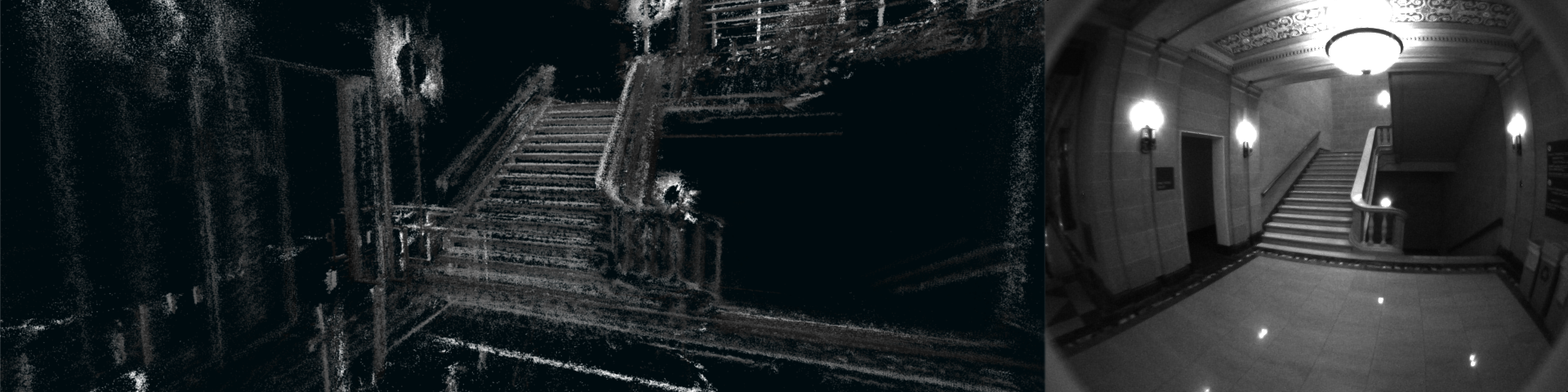
- Input: The sparse map of a portion of the scene (from the first BLS iteration)
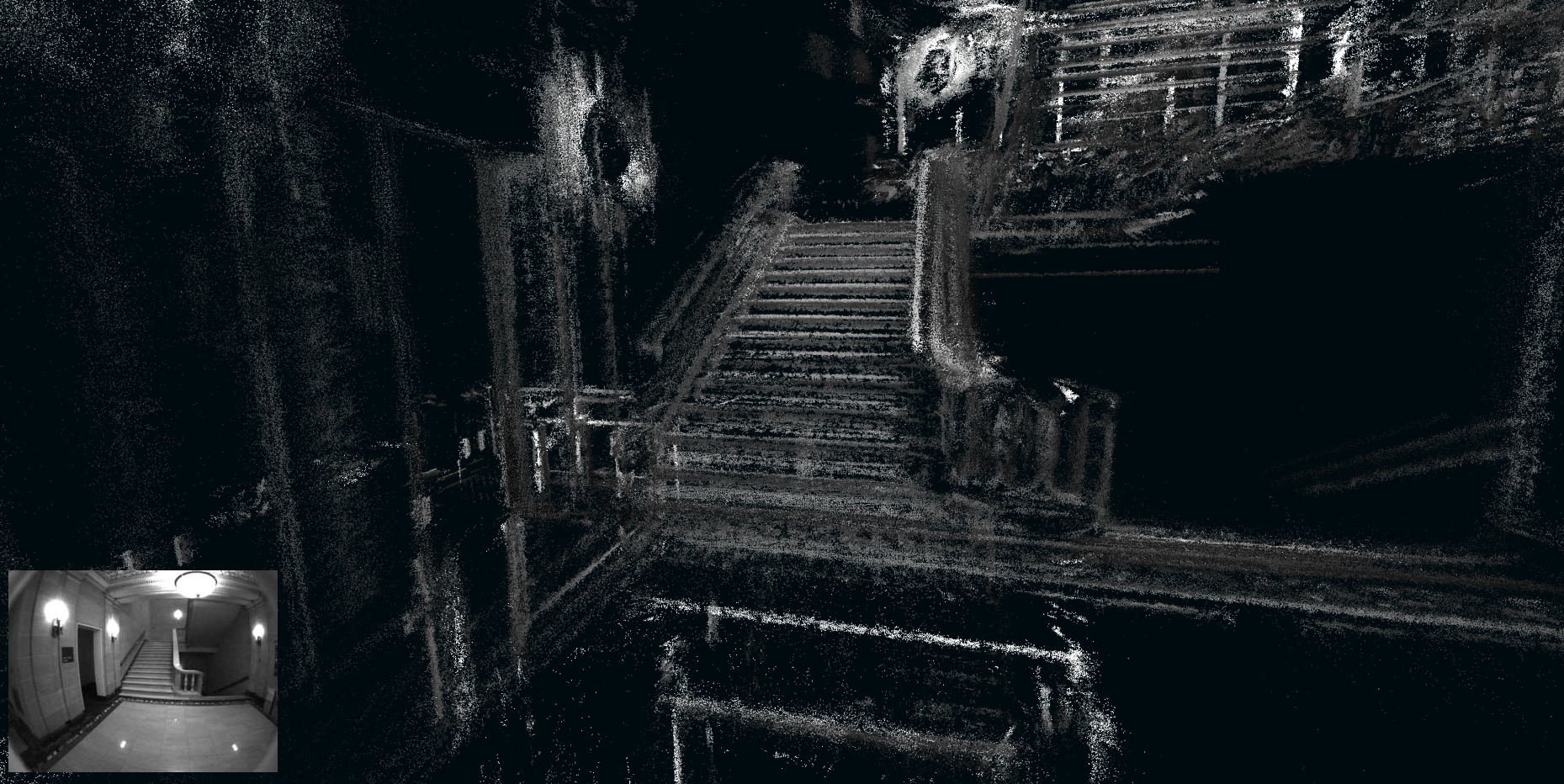
- Output: A semi-dense map of the same portion of the scene (from the final BLS iteration)
- Relevant Publications
- P1. C.X. Guo, R.C. DuToit, K. Sartipi, G.Georgiou, R. Li, J. O'Leary, E.D. Nerurkar, J.A. Hesch, and S.I. Roumeliotis, "Resource-Aware Large-Scale Cooperative 3D Mapping from Multiple Cell Phones," In ICRA Late Breaking Results Poster, Washington, May. 26-30, 2015.